
VRSG Support for Aerial Refueling Simulation

MVRsimulation VRSG real-time scene of a simulated KC-135R aircraft refueling an A-10C over the Denver, CO, area of virtual CONUS++ terrain.This scene also features volumetric clouds which cast shadows onto the terrain and culture below. Refueling-specific features of VRSG include support for up to 4 shadowable light sources.
MVRsimulation VRSG contains features designed specifically for high-fidelity aerial refueling training. The 3D military aircraft models delivered with VRSG include geometric detail sufficient to support the aerial refueling mission.
The primary requirement of an image generator used in boom operator training is to provide accurate and high quality representation of shadows cast by potentially several light sources. VRSG includes advanced object-on-object shadowing features and can support up to four concurrent, independent, occulted, and shadowed light sources. These multiple shadowed light sources can be allocated to the sun or moon, the tanker tail flood light, the receiver nacelle lights, or any other light source requiring shadowing. Shadowed light sources can be attached to either the tanker or receiver aircraft.
Self-shadowing of the receiver aircraft is supported. For optimal performance, VRSG generates ultra high-resolution shadow maps of varying resolutions for each active light source to support shadows projected by tanker and receiver aircraft geometry.
To minimize perceived aliasing, VRSG multi-samples each shadow map, using a per-pixel-unique randomly oriented sampling kernel resulting in softened and anti-aliased shadow boundaries. With generating the varying resolution shadow maps, VRSG can use the highest resolution shadow map for the highest contrast light source, which is the light source most likely to cause aliasing artifacts.
During day operations when local light sources are not utilized, VRSG allocates more computing resources to the production of the sun shadow, as the sun shadow is of higher contrast and requires more anti-aliasing to achieve a quality result. During night operations, VRSG can reallocate these resources among multiple lower-contrast shadow casting light sources. Lower contrast light sources can use lower resolution shadow maps for better performance.
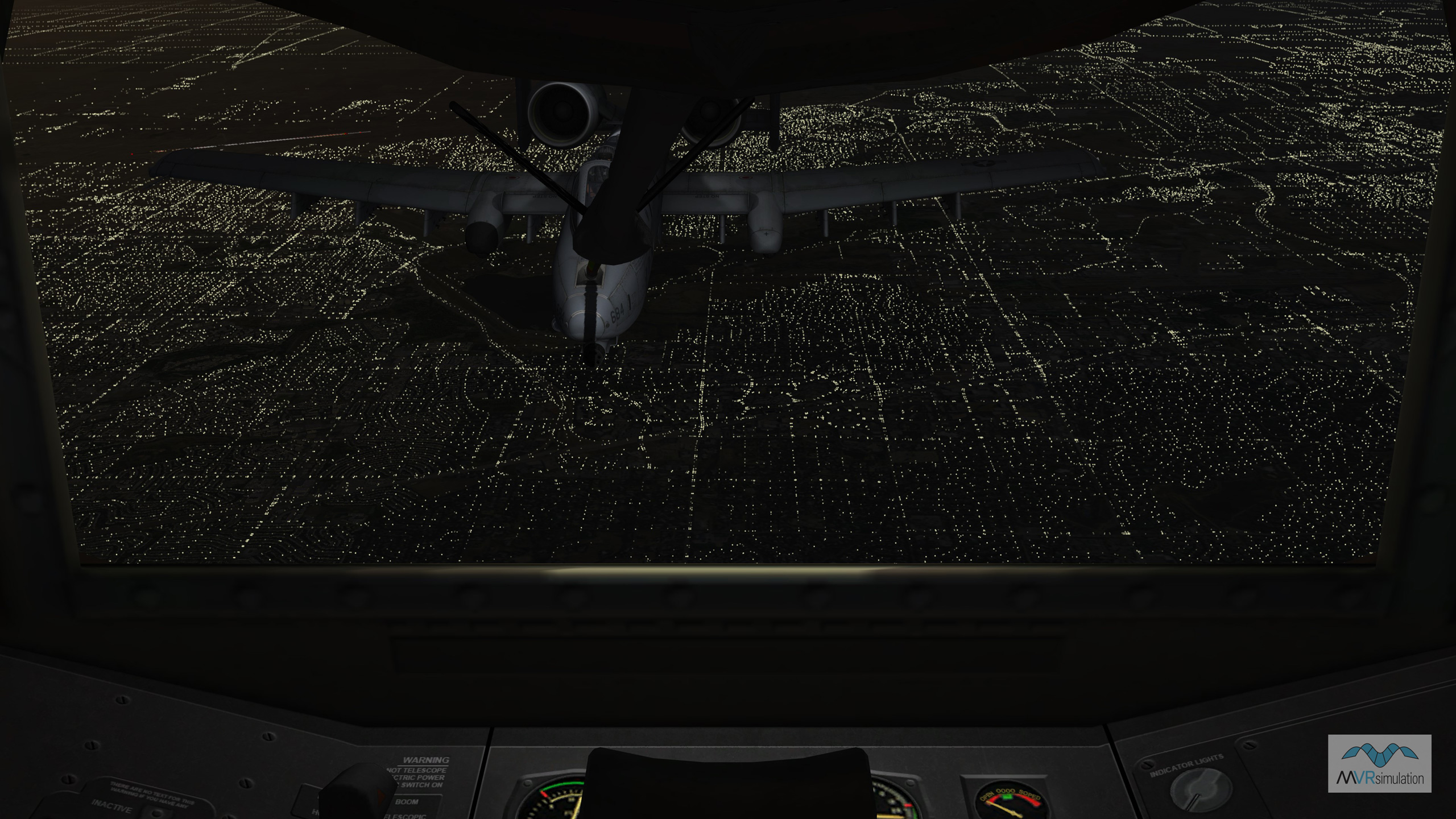
MVRsimulation VRSG real-time scene of the simulated boom operator view of a simulated KC-135R aircraft refueling an A-10C during night operations over the Denver, CO, area of virtual CONUS++ terrain. The scene features the shadows cast by the KC-135R's tail-mounted flood light illuminating the A-10C, and the cultural lights of Denver.
For light sources that do not require shadowing, VRSG supports a feature called "addressable light maps." Addressable light maps are built into models using multi-texture. Up to 16 addressable light maps are supported per model, and an unlimited number of models per-scene. Addressable light maps are useful for applications such as illuminating refueling receptacles, the F-16 tail flood light, or illumination of culture from local light sources. For any addressable light map on any model, the host software is able to specify an intensity level of the light map using a floating point continuum of 0 to 1.0.
Unlike other systems that require a finite number of discrete illumination levels baked into a switch node of a model, VRSG's addressable light maps offer a full continuum of intensity control.
VRSG also supports pilot hand-signals and other human animations. These animations can be modeled as articulated parts or with VRSG's BVH-based skinned-mesh character rendering engine.
Additionally, VRSG uses GIS vector data of road networks to place light points of random spacing and intensities, resulting in realistic nighttime scenes of urban areas from high altitude. Recognizable road networks are often used in nighttime refueling operations to enhance navigation and situational awareness for pilots.
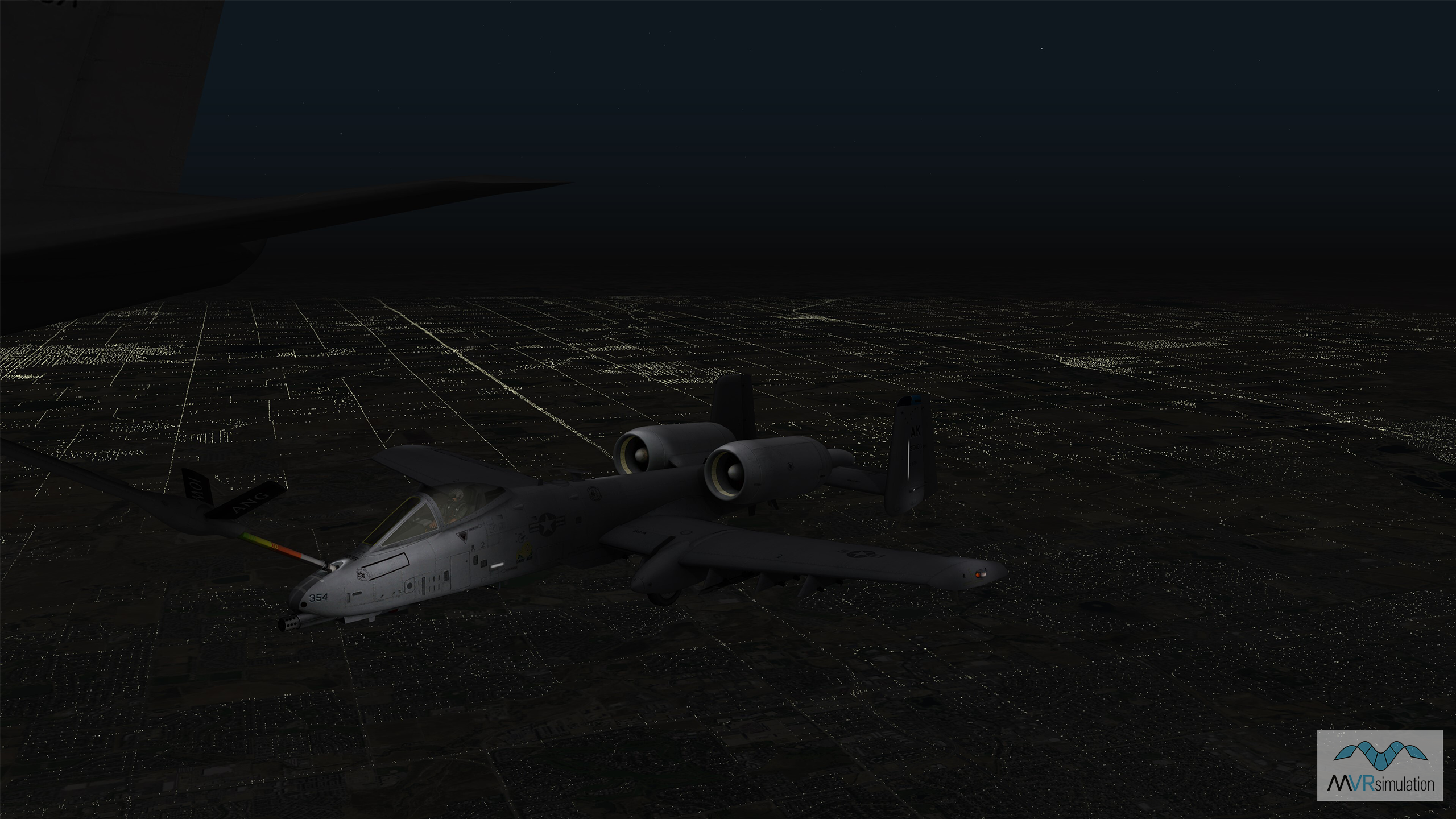
VRSG uses GIS vector data of road networks to place light points of random spacing and intensities.
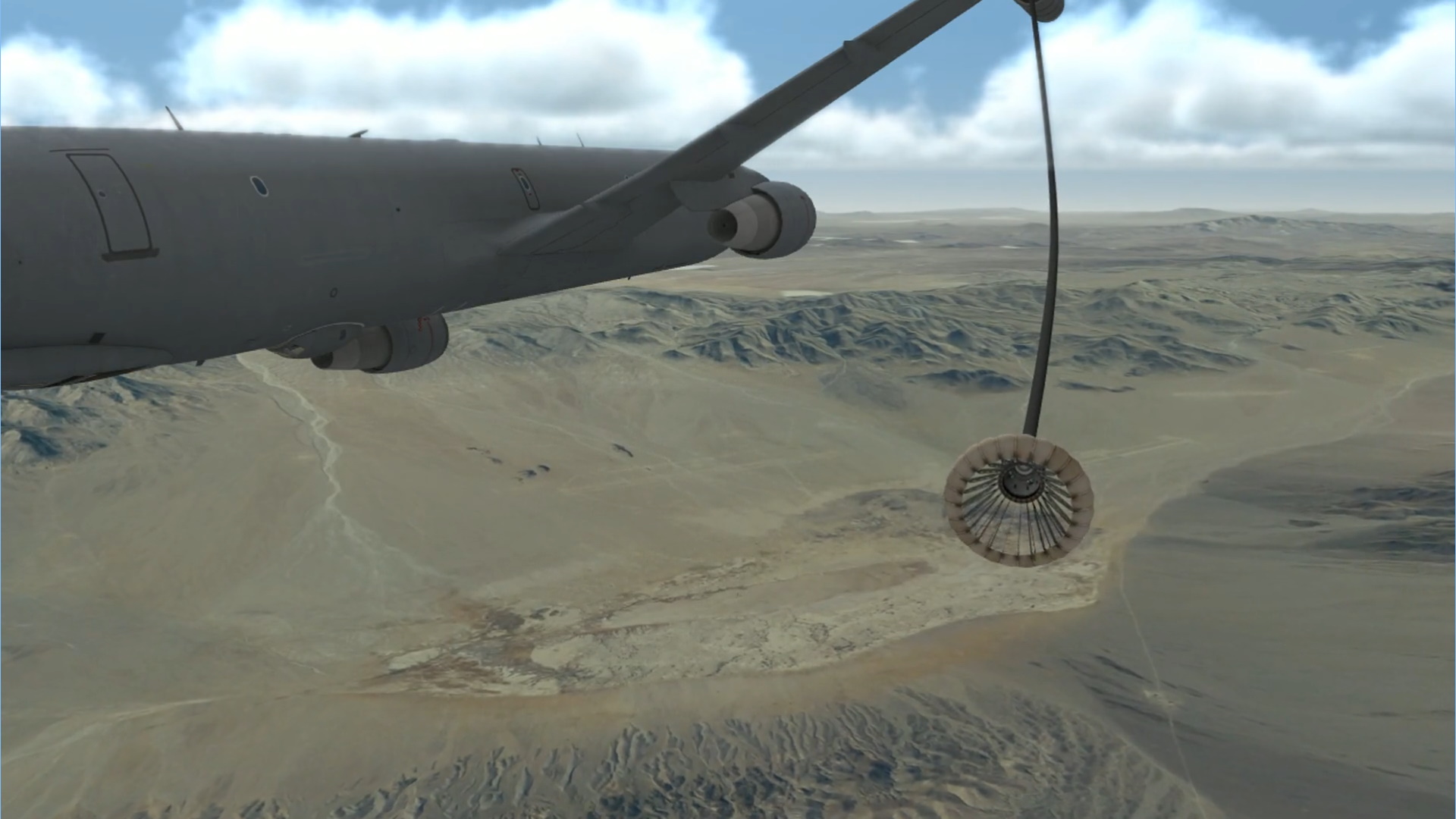
The above video illustrates what is possible with developing custom plugins for VRSG. In this example, a VRSG plugin is used to model the physics of a refueling drogue hose, creating and rendering custom geometry for the hose. The receptacle is a 3D model, which the plugin instructs VRSG to position and orient at the proper place, given the modeled state of the hose. The plugin need not model the receptacle geometry, only the hose itself. This sample plugin is provided with source code to VRSG developers, from which they can develop physics-based dynamic geometry visualizations.

Inside the boom pod of the KC-135R Air National Guard (ANG) Boom Operator Simulator System (BOSS) with MVRsimulation visuals. (Photo courtesy of FAAC Inc.)